Instructions pour l'éclatement gaussien à l'aide de Postshot
J'écris cet article pour les utilisateurs de XangleCS, ce qui signifie qu'il est optimisé pour les rigs multi-caméras, qu'ils utilisent le bullet-time ou des systèmes de photogrammétrie.
Pendant tout ce temps, nous étions donc en train de préparer la matière première pour produire de vraies photos en 3D ? Pendant des années, j'ai éprouvé un profond sentiment d'insatisfaction à l'égard du résultat de mes prises de vue en bullet-time. J'ai toujours su qu'il y avait plus de potentiel, et je m'en suis approché avec l'interpolation d'images, mais cela n'a jamais atteint la fluidité que nous pouvons maintenant obtenir avec le Gaussian Splatting. Dans ce billet, je vais vous présenter mon flux de travail de post-production, en particulier pour Xangle Camera Server comme vous.
Cela fonctionne avec la plupart de vos prises de vue en bullet time en mode Freeze (n'essayez pas avec les prises de vue par intervalles... nous avons besoin de voir le même moment sous tous les angles). Cette méthode permet de corriger les problèmes d'étalonnage et de scintillement, mais elle échoue si vous essayez d'alimenter la machine avec des images mal synchronisées. Eliminez toutes les images tachées ou floues.
Logiciel requis
Capture de la réalité - https://www.capturingreality.com
Postshot - https://www.jawset.com
Étapes de post-traitement :
1- Localisez vos fichiers originaux dans votre dossier de sortie Xangle c:\Nusers\N%userprofile%\Nxanglecs\Noutput
2-(Facultatif, pour une meilleure qualité) Ouvrez vos fichiers bruts dans Lightroom. Appliquez le débruitage AI, l'étalonnage, et ajustez un peu la texture et la clarté avant d'exporter au format PNG 16 bits. Sautez cette étape si vous photographiez en JPG.
3- Lancez Reality Capture et ajoutez vos fichiers d'entrée (Workflow / Inputs).
Si vous avez utilisé des marqueurs standard, commencez par les détecter automatiquement.
Cliquez sur Alignment / Alignment Images, et assurez-vous que toutes vos caméras sont correctement enregistrées
4- Exporter les poses de l'appareil photo :
Naviguez jusqu'à l'onglet ALIGNEMENT et sélectionnez Enregistrement dans le sous-onglet Exportation.
Dans la boîte de dialogue Exportation du fichier d'enregistrement, définissez Enregistrer comme type à Paramètres de la caméra interne/externe pour enregistrer les poses en tant que
.csvfichier.Dans la fenêtre Paramètres de l'exportateur, utilisez les paramètres par défaut.
5- Exporter le nuage de points :
Sous le sous-onglet Exportation, sélectionnez Nuage de points.
Dans la boîte de dialogue Exporter le nuage de points, réglez le type d'enregistrement sur Nuage de points épars au format de fichier polygonal (*.ply).
Dans la fenêtre Paramètres de l'exportateur, utilisez les valeurs par défaut, mais adaptez-les :
Exporter les couleurs des vertex: Régler sur True.
Exporter ascii: Définir à False.
💡 Conseil: Sauvegarder les deux .csv et .ply dans le même dossier que les images. Glissez-déposez le dossier dans Postshot pour importer facilement l'ensemble des données.

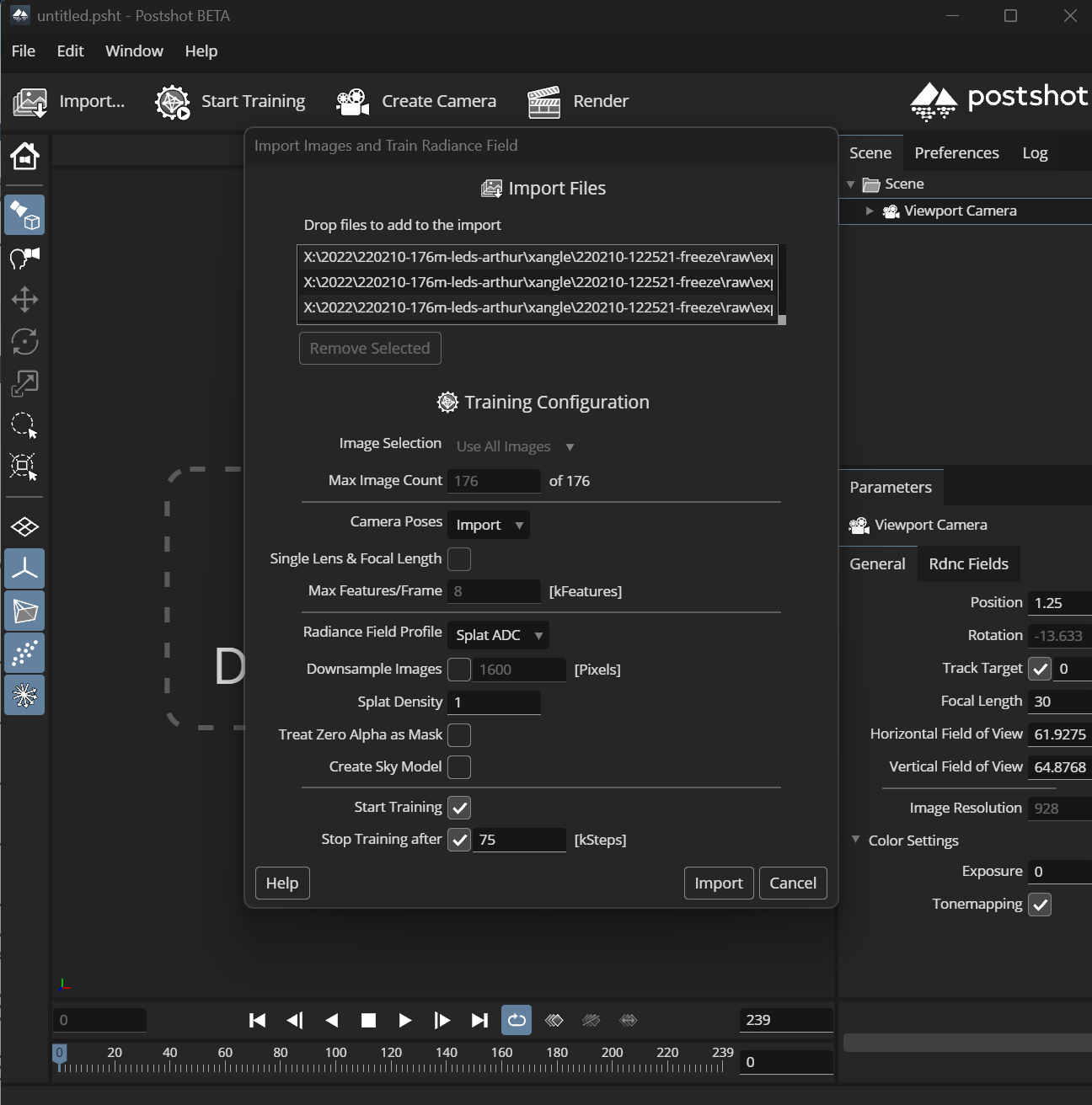
6- Lancez Postshot. Déposez vos fichiers PNG ou JPG (Postshot fonctionne mieux avec les images "mal calibrées") ainsi que les fichiers CSV et PLY générés par Reality Capture.
7- Une fois la formation terminée, créez une caméra et sélectionnez-la dans le menu déroulant comme indiqué ci-dessous.

8- Naviguez autour de votre sujet, ajoutez des points clés et amusez-vous à explorer votre séquence avec la caméra virtuelle. Vous pouvez trouver un tutoriel complet sur les points clés Postshot ici :
9- Enfin, exportez votre fichier MP4 depuis Caméra/Sortie avec les paramètres suivants :

Exemple de sortie :